Objective
The objective was to design the control system for an unmanned ground vehicle. The control system was supposed to obtain the input sequences for a DC motor powered robot using its odometry.
Research Aspects
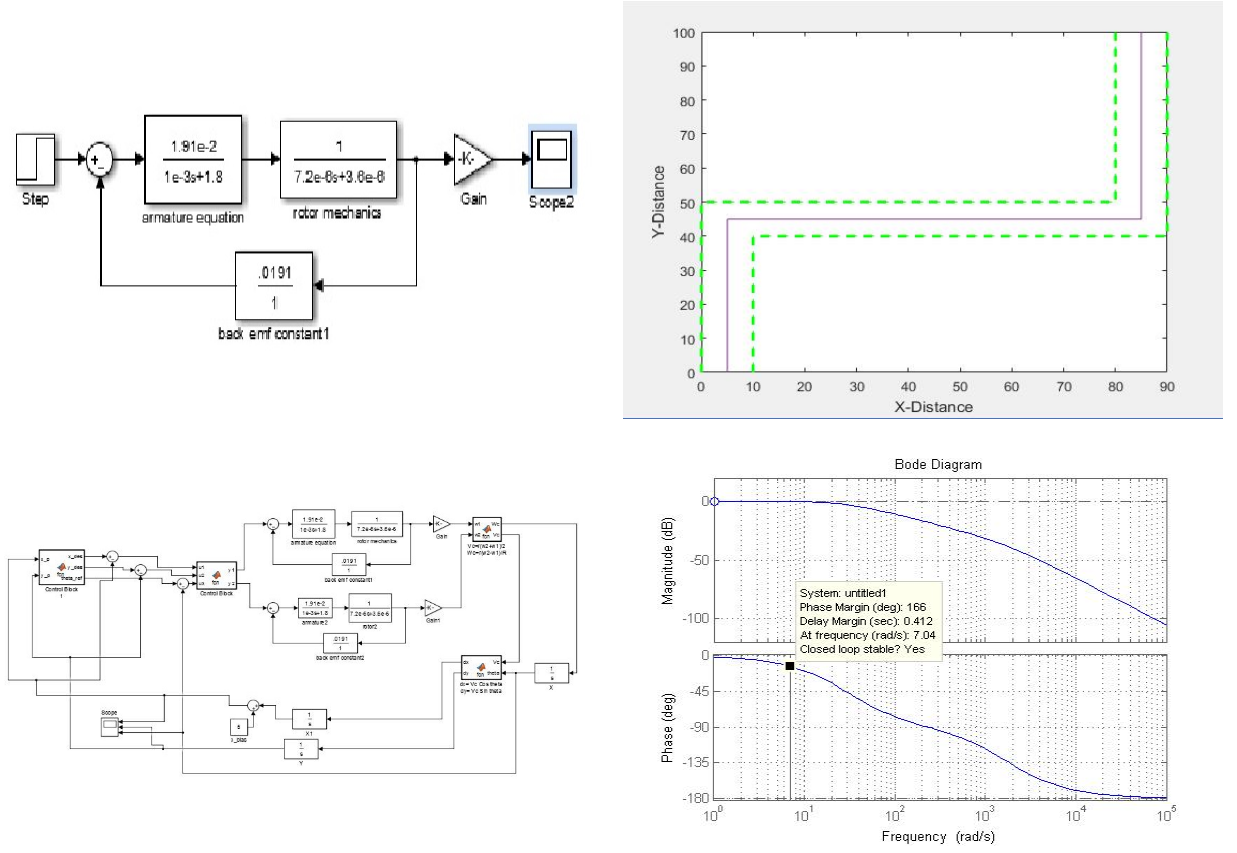
- The complete control system was designed on MATLAB-SIMULINK using the transfer functions obtained from the intrinsic characteristics of the motors
- The Control Systems Library of SIMULINK was used for the various control blocks
- The system was simulated on a pre-defined map where it was supposed to traverse along the same without collisions till the target
Methodology
The sample UGV had differential drive mechanism for motion with the two rear wheels powered individually and the front wheel was the castor wheel. The rear wheels had series DC motors whose speed was regulated via armature-voltage controlled. By virtue of the back emf, the motors had a closed loop control.
Results
- The simulation of the control system was successfully performed
- The system showed stable closed loop operation with easy to control feedback signals
- Awarded full score for the project work under the subject - Modern Control Theory & Designing Techniques
Gallery