
About The Event
The event Tech-Expo was a student innovation contest organised at MNIT JAIPUR during its anual Techno-Cultural Fest - BLitzschalg ‘14. The objective was to propose an engineering solution to any existing world problem or assist the same.
Objective
Building a robotic arm capable of replicating the motion of human arm using a sensor powered pair of gloves.
Research Aspects
- Used adaptive local minima and maxima algorithm to map flex sensor and artifical arm motion that accounted for the erratic nature of the flex sensor
- 2.2” Flex sensors used for sensing the movement of the fingers
- Low torque servo motors for actuation of the fingers of the artificial robotic arm
- Setup has 15 degrees of freedom with all the 3 joints of an individual finger steered by a single actuator using wire for power transmission
- Processing done via Arduino micro-controller
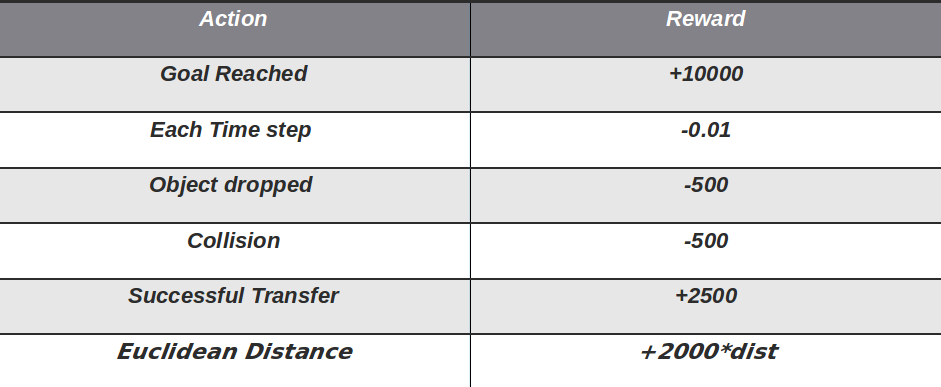
Reward Structure For the Agent
Methodology
The arm was designed just as a human arm with fingers and the palm. The fingers were powered using low power servo motors and had an actuated wrist as well. The arm was controlled using a glove with flex sensors that could map the motion of the finger to that of the motion of the fingers of the artificial robotic arm using a micro-controller based decision-making system.
Results
- The setup had mediocre efficiency and performance
- Won the runners up prize for our innovative Robotic Arm in Tech-Expo ‘14 as a freshman
- Renovated the design with better 3D printed parts for efficient and better performance
Gallery
